| 产品特性:性能稳定 | 是否进口:否 | 产地:西安 |
| 加工定制:是 | 品牌:hkeb | 型号:HK-MVSPT |
| 产品用途:HK-MVSPT视觉定位检测系统***视觉定位系统 | 规格:可以便捷地实现手眼标定。 | 精度:0.01mu |
| 速度:60-80m/min | CUP:双核 | 内存:4G以上 |
| 可用机器:机械臂等 | 标尺1:0.075mm | 标尺2:0.012mm |
| 标尺3:0.12mm | 定位精度:0.001mm | 功能:纠偏和组装 |
一、视觉定位检测系统
随着工业生产中对自动化的要求越来越高,视觉技术已被广泛引入工业机器人行业,具备视觉的工业机器人能更快、更准、更灵活地完成定位抓取、对位组装等。基于图像分析的视觉技术在机器人引导相关应用中的主要作用是***获取对象物(待抓取物体)和目标物(待组装物体)的坐标位置和角度,并将图像坐标转换为机器人能识别的机器人坐标,指导机器人进行纠偏和组装。因此,手眼标定和定位引导是机器视觉在机器人引导中应用的的核心。HK-MVSPT视觉定位检测系统,结合国内外***研制开发的***视觉定位系统。HK-MVSPT算法平台中具备丰富的定位工具和包含N点标定在内多种标定工具,可以便捷地实现手眼标定。

二、视觉定位检测系统构成部件
系统主要部件连接组成,包含图像采集系统,控制系统,处理系统,图像显示模块。
三、视觉模块外型设计特点
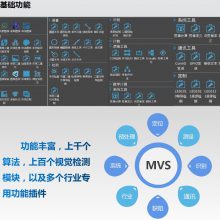
产品系统的采图模块,一体化设计,体积小集成度高,方便安装,保护性好。可根据需求调整前端光源部分的结构,可进行环形光源、条形光源、同轴光源等多种组合光的搭配。
四、系统应用
静态坐标螺孔定位
将产品的特征点位经过标定计算后,发送至运控系统进行下一步动作。精度可达0.01mm
同步带动态定位跟踪抓取
在同步带上将传送的产品进行分选,根据视觉特征识别的产品坐标经过与同步带计算得出的运动轨迹发送给机器人后进行动态跟踪抓取。
焊接引导定位
通过光源辅助成像,将焊缝起点位置进行准确识别并计算出坐标值,针对产生形变的产品,取得多个焊
缝点位进行拟合计算,将焊接轨迹坐标传输给机器人进行焊接动作。